制御は、イノベーティブに。
システム・インテグレータとして、ロボットによるソリューションを提供します。
省人化や省力化といったゴールをふまえ、提案から設計、レイアウトなど、ジャストフィットかつイノベーティブな制御システムを構築し、工程の課題を解決します。
ロボット自動化ストーリー
※ロボット導入実証事業事例紹介ハンドブック2016から抜粋

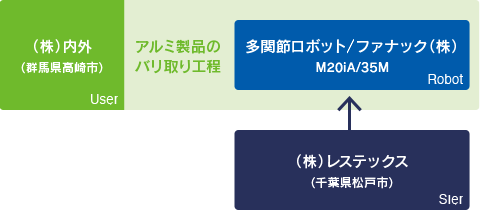
●アルミ製品の押し湯やバリ取りの工程にロボットを導入。
●ビジョン判定を採用して自動化に成功、仕上げ作業員3名のうち2名を削減。


概要
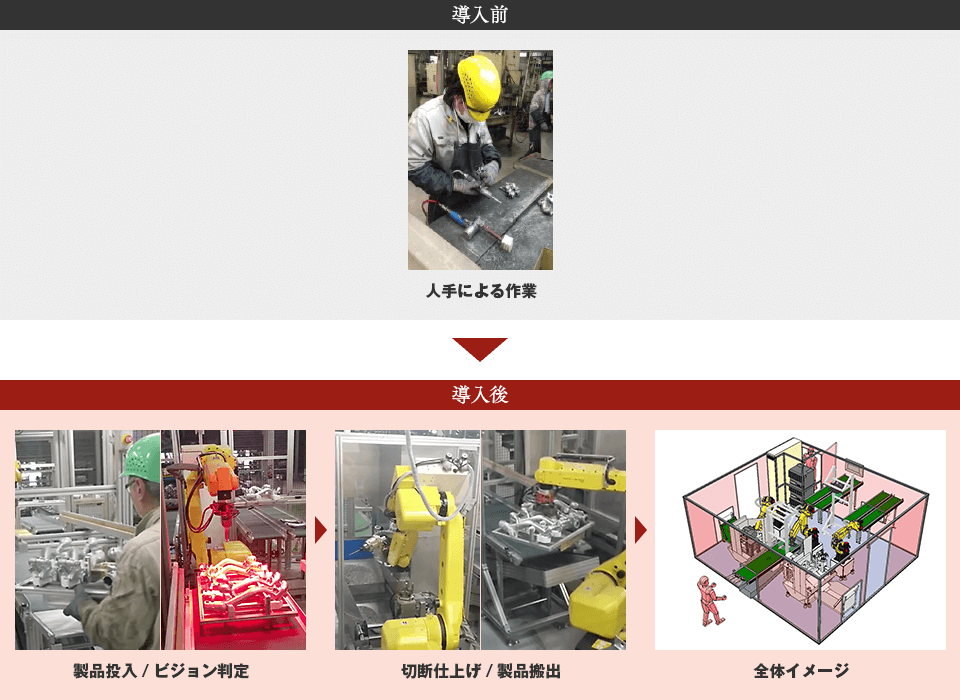
アルミ製品の鋳バリは、特に金型の老朽化等で多く発生し、手作業が慢性化していた。付加価値を産み出さない工程ながら、粉塵など安全面での懸念も多く、自動化が求められる環境であった。そこで今回、アルミ鋳造後、製品を冷却した後に、押し湯と呼ばれる不要部品や、主に外周部に発生する鋳バリを除去する工程にロボットを導入した。
自動化の内容は、(1)ベルトコンベアでランダムに流れてくる製品を、ビジョンカメラで撮影、(2)ビジョンに基づき、製品種や向きなどを自動判定し、作業開始する、(3)押し湯の切断、外周部のバリ取りを実施し、製品コンベアへ排出する、というものである。
設置後のトライアルにより、仕上げ作業3名仕上げ作業のうち2名分を自動化することができた。ビジョン判定を積極的に採用した事で、少量多品種型とも言える人作業に劣る事の無い結果を得る事に成功した。
実績
-
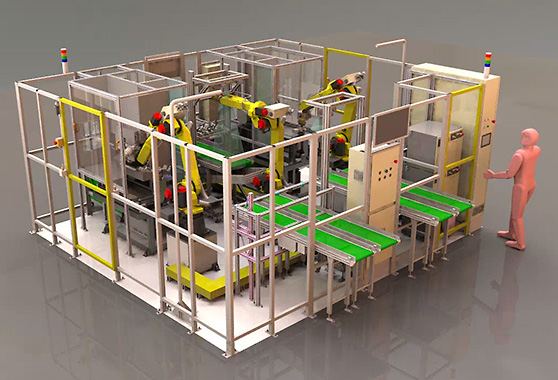
- アルミ製品仕上ロボット設備
-
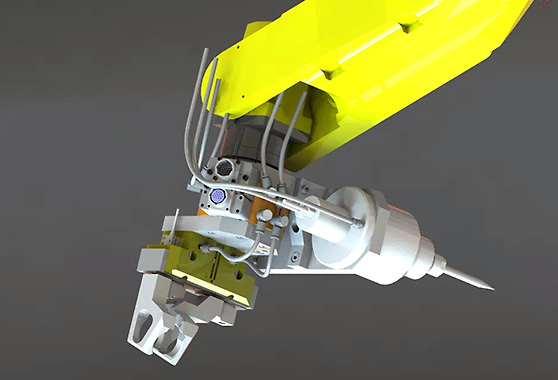
- ロボットハンド 3Dデータ
-
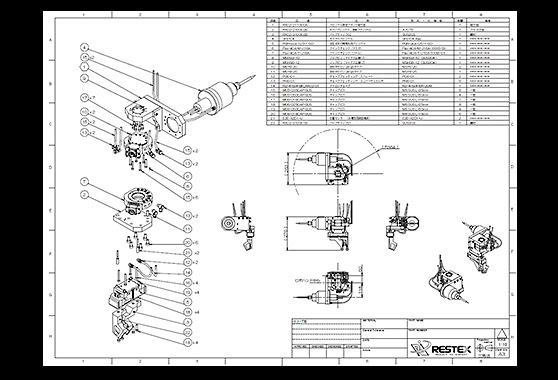
- ロボットハンド 詳細図
-
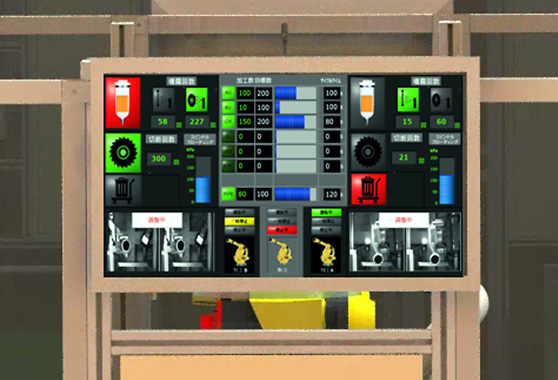
- ロボット状態モニタ表示