TM Robotの導入環境や設計開発ハンド事例をご紹介します。
-
-
食品調理は、安定動作で同じ味!
利用機器TM-REX5S
パッと見は、「省人化でしょ」と思われます。
でもこれ、実は味の均一化のための自動化なのです。
肉も卵も素材は高級品、だけど調理する人が変わると調理時間も変化して、味そのものが変わっちゃう。動画を見る 
-
-
-
パレタイズは、コンテナだって可能です!
利用機器TM-Palletizing Operator
コンベアからパレットへ搬送作業のPalletizing Operatorです。
普段は段ボール箱を吸着搬送するのが一般的ですが、製造業ではコンテナを通い箱にされているケースもあります。コンテナ搬送に特化したハンドも作れます。動画を見る 
-
-
-
プレス抜き、表と裏を見分けます
利用機器TM-REX5900
プレス抜きした製品をパーツフィーダーを介して、整列させます。
プレス抜きした凸向きをそろえる作業は、人で行うと結構疲れます。
そんな時は、協働ロボットで創意工夫し自動化解決。
夜間のうちに無人作業で、朝には完了しています。動画を見る 
-
-
-
ほとんど自動で。たまには人で。
利用機器TM-REX5900(RESTEX製パッケージ)
協働ロボットの利便性は、すぐに人作業に戻せる点もメリットです。
どうしても急に一つだけ検査をする、というケースありませんか?
専用機だとその一つのための切替手順が複雑な場合が多いです。
既存機器と「通信・接続しすぎない」使い方がおススメです。動画を見る 
-
-
-
ほとんど自動で。たまには人で。Part2
利用機器TM-REX5900(RESTEX製パッケージ)
ネジ締めを自動化する場合も、少量だから人で1時間だけ作業したい。
そのような時を考慮して「ロボットがネジ締め機を掴む」という構成はいかがでしょうか。
普段はロボットで自動化し、人作業が必要な時は工具無用で取外し自由という発想がおススメです。動画を見る 
-
-
-
初期は複雑、導入してみてシンプル改造
利用機器TM-REX12S
焼き物への薬塗布作業を自動化しました。
最初は人作業の真似で、製品をひっくりかえし自動搬送。
時間がかかるからと、ハンド見直し工夫したら最終形は意外とシンプル。
やってみないとわからない、ですね。
夜間のうちに無人作業で、朝には完了しています。動画を見る 
-
-
-
段ボール箱、床面天面ともに自動化
利用機器TM-REX12S
段ボール箱を平らな状態から吸着搬送し、封函します。
箱の組立、床面のテープ貼り、仮置きして中身を入れて再度天面のテープ貼りを行います。
封函作業を完全自動化。肝心なのはハンドです。 
-
-
-
ラベルも搬送、貼付け後はローラー仕上げ
利用機器TM-REX12S
段ボールに出荷用のラベルを貼ります。
ラベルが排出されたことを標準搭載カメラで検知、吸着搬送して貼り付けた後は、ローラーでコロコロします。
ハンドと動きで創意工夫が大切です。 
-
-
-
専用工具も取付容易なカスタマイズ
利用機器TM-REX5900, TM-REX5S
レーザー溶接のパッケージ。RESTEXの協業先が得意です。
トーチは人でも使うから、そのまま掴む専用設計。
どんな形でも、RESTEXなら掴めます。 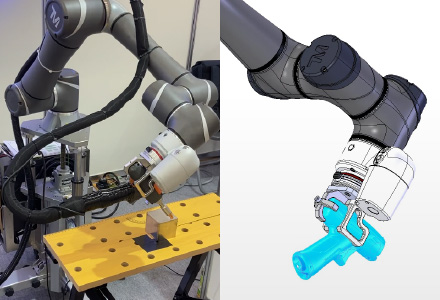
-
-
-
高級装置は、改造せずに使いましょう
利用機器TM12
既存の三次元測定機を、昼間は人が使います。
夜間に毎日、抜き打ち検査の製品40個を自動計測させています。
1個15分で、約10時間。三次元測定機は非常に高額なので、配線改造は行わず、ロボットでマウスクリックならぬタッチペンクリック。動画を見る 
-
-
-
協働ロボットも、ダブルハンド
利用機器TM12
産業用ロボットで、サイクルタイムを稼ぎたい速い動作ではダブルハンドがお勧めです。
協働ロボットも安全センサを活用することで安全柵ありの産業用として高速動作がメリット大。
しっかりしたダブルハンドの構築もRESTEXでは設計経験豊富です。 
-
-
-
丸いものは、斜めに入れる
利用機器TM12S
製品をケースに入れる場合、周囲に干渉することはありませんか?
自動化する際は、人の作業の感性を真似ることが秘訣です。
丸いものは、並行に落とし込まず、少し傾けてスーっと入れるのが人作業では当たり前。ロボットでも真似してみては如何でしょう。 
-
-
-
人の力で強制Open可能な安全ハンド
利用機器TM-REX標準電動ハンド(RESTEX製作)
シンプルな平行2爪グリッパをお探しなら、RESTEXが提案する標準ハンドはいかがでしょうか。
爪がCloseの状態でも指の力でOpenできるので非常に安全です。
万が一の衝突を考慮し、先端爪を3Dプリンタの樹脂製とすることで、更なる安全性に配慮しています。動画を見る 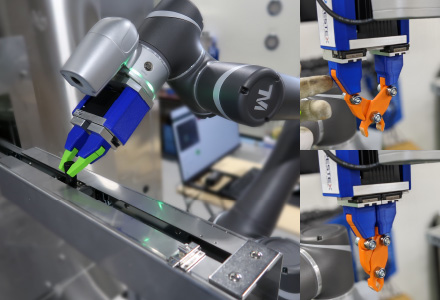
-
-
-
標準ハンドは選択式
利用機器2爪 or 吸着グリッパー(RESTEX製作)
レステックスが提案する協働ロボット一体型システムのハンドは選択式です。どれを選んでも価格は一緒。
同時搭載されている手動ツールチェンジで交換も簡単なので、作業に合わせて入替え利用も可能です。動画を見る 
-
-
-
加工機との連携はダブルハンド
利用機器ロボットハンド(北川鉄工所製 NTS3シリーズ)
加工機との連携では、ハンドを2つ付けたダブルハンドはいかがでしょうか。
「加工済を取る」&「未加工品を取り付ける」をロボットの動作いち往復で行うのがおススメです。 
-
-
-
粉塵環境にはジャケットを!
利用機器防護ジャケット(TIT製 ROBOFIT)
TM Robotは標準で防塵防滴機能が比較的低いため、環境によっては防護ジャケットを装着することがおススメです。
ゆったりしたポンチョスタイルが交換を容易にさせるポイントです。 
-
-
-
ハンドは動かなくてもイイんじゃない!?
利用機器アルミフレーム&板金(RESTEX製)
コンベアから流れてくる製品を受け取って運ぶ。
そのような時は、シンプルな構造で解決してはいかがでしょうか。
ロボット動作の往復時間を効率化するため複数個同時に処理できる工夫がおススメです。動画を見る 
-
-
-
円筒形はV字でつかめ!
利用機器2爪電動グリッパー(OnRobot製 RG6)
直径18mmから100mmくらいまで、同じハンドで搬送したい。そのような時は、RG6ではいかがでしょうか。
可動範囲が広くプログラム上で範囲調整ができるので高級ですがおススメです。 
-
-
-
反力はバネで抑制
利用機器グリッパ先端(RESTEX製 汎用品リニアガイド)
研磨や押付けなどで力覚センサーを検討される場合も多いと思います。
シンプルな動作であれば巻きバネで反力を抑制する方法はいかがでしょうか。
TMの標準機能でコンプライアンスノードを活用すると30N以上の力は押付けを制御できるのでおススメです。 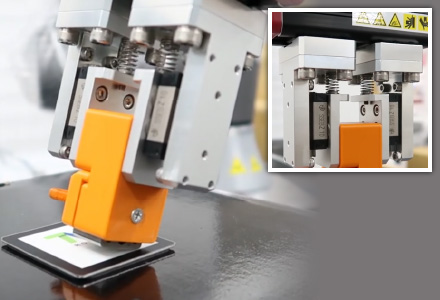
-
-
-
マグネットも搬送方法の一つです!
利用機器マグネットグリッパ(SMC製 MHM Series)
吸着も掴むのも不可能な時、板金+マグネットの組合せはいかがでしょうか。
トレイなどの裏側に板金を貼付けて、マグネットで滑らないように搬送する。製品を直接運ぶ必要が無い時の選択としておススメです。 
-
-
-
ハンドを横向きに!
利用機器2爪電動ハンド(RESTEX製作)
TM Robotはカメラ下向き姿勢の自由度が非常に高いロボットです。
製品を横向きに把持する場合はハンドを横向きに取り付けるのはいかがでしょうか。
先入観に捕らわれず創意工夫が成功のカギです。 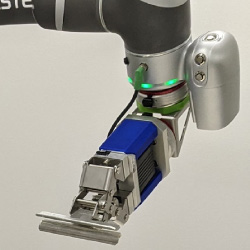
-
-
-
吸着ポイントがたくさんあるときは真空エジェクタ
利用機器吸着グリッパ(SMC製 真空用機器)
製品形状が複雑で、多点接触で吸着搬送したい場合は工場圧縮エアを駆動源とした吸着搬送システムはいかがでしょうか。
電磁弁でエアの流れを制御し吸着ON/OFFが可能です。オレンジの取付部はRESTEX社内の3Dプリンタで製作しています。 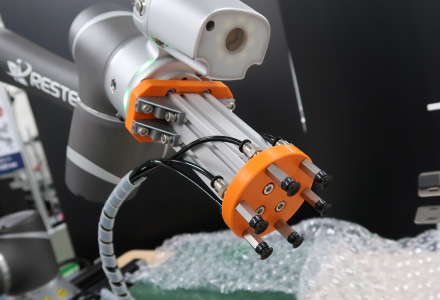
-
-
-
吸着箇所の工夫で長物搬送もOK
利用機器吸着グリッパ(シュマルツ製 コボットポンプ)
吸着搬送はパッドが一つとは限りません。
細長いパッドを2つ使う工夫はいかがでしょうか。
径の細い長い製品も搬送が可能です。動画を見る 
-
-
-
梱包製品の表面文字で向きと位置を決める
利用機器吸着グリッパ(コンバム製 SGEシリーズ)
簡単だけど時間が取られる仕事や、数十秒毎など中途半端に時間が空く仕事を人が嫌がるものです。嫌な仕事はミスも出やすく生産性が下がります。
1日分の仕事にはならないけど、、、ロボット使い始めてみませんか? 
-
-
-
動作速度の遅さを複数搬送でカバーします
利用機器吸着グリッパ(SMC製 真空用機器)
ロボットの可動時間は、移動距離による影響が大きいです。搬送個数を1個から4個に増やすことで、サイクルタイムを大幅に低減可能です。
搬送ミスリスクを配慮しながら複数同時作業とするのがおススメです。動画を見る 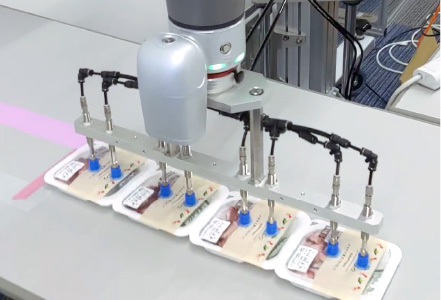
-
-
-
吸着は位置出しが簡単
利用機器吸着グリッパ(コンバム製 SGEシリーズ)
掴むハンドに比較し、吸着グリッパはロボットティーチング時の位置精度が曖昧でOKです。
高さ方向もジャバラの段数が多いパッドを採用することで衝突を回避できます。 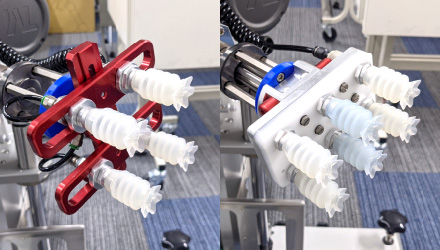
-
-
-
凹凸異形物の搬送ならコレ!
利用機器吸着グリッパ(コンバム製 SGEシリーズ)
位置決めが出来なくても、とにかく運びたい!
そのような時はこちら。製品形状に柔軟追従する先端パッドで凹凸がある製品でも吸着搬送可能です。 
-